Localizar, bloquear ou limpar seu smartphone ou computador perdido
Se seu smartphone, tablet ou laptop for perdido ou roubado, siga estas etapas para ajudar a localizar e proteger seu dispositivo. Se não for possível recuperar o dispositivo, a realização imediata de algumas etapas pode ajudar a proteger suas informações. Etapa 1: localizar e proteger o smartphone, tablet ou Chromebook perdido Você pode tentar usar algumas ações remotas, como tocar, bloquear ou sair da sua conta no dispositivo. Perdeu um computador Windows, Mac ou Linux? Os computadores não são listados em "Encontrar seu smartphone". Avance para a etapa de alteração da senha da sua Conta do Google. 1- Abra um navegador, como o Chrome Chrome. Se você estiver usando o dispositivo de outra pessoa, utilize o modo de navegação privada. 2- Acesse myaccount.google.com. 3- Na seção "Login e segurança", selecione Encontrar seu smartphone. 4- Selecione o smartphone, tablet ou Chromebook perdido. 5- Siga as sugestões passo a passo para ajudar a localizar e proteger o dispositivo. Se você estiver usando o dispositivo de outra pessoa, quando tiver terminado, saia fechando o modo de navegação privada. Mais ajuda No caso de um iPhone perdido, aprenda maneiras de localizar e proteger seu dispositivo com o iCloud. • Sua operadora de celular pode ajudar de algumas formas, como: • .redirecionando suas ligações para um número diferente; • pedindo um novo cartão SIM; • desativando seu cartão SIM para que outra pessoa não possa fazer chamadas ou enviar mensagens.
Segue vídeo explicando o procedimento.
O dispositivo não está listado
Verifique se você está conectado à Conta do Google certa no dispositivo que você está usando atualmente.
Seu dispositivo perdido precisa estar conectado à sua Conta do Google em um app do Google, como o Gmail ou YouTube.
Computadores Windows, Mac e Linux não são listados em "Encontrar seu smartphone".
Se seu dispositivo ainda não estiver listado, avance para a etapa de alteração da senha da sua Conta do Google.
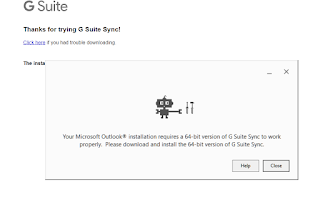
Após uma atualização, remoção e posteriormente uma instalação do outlook na versão atual. É provável que você tenha o seguinte erro no aplicativo G Suite do Google, instalado no seu computador para sincronização de sua conta gmail com o outlook. Eu tentei instalar a ferramenta GSSMO várias vezes, mas eu estou recebendo uma mensagem de erro que o meu Outlook requer a versão de GSSMO 64-bit. Este é o erro:
Acesse na guia identificada acima e baixe o arquivo 64 bit, realize a instalação e pronto problema resolvido. Irei disponibilizar no google docs o arquivo caso prefiram:
clique aqui
Espero ter Ajudado....
Galera segue um passo, na medida do possível completo. Com as configurações que poderá servir para diversas marcas de impressoras Matricial, por exemplo: Daruma, Bematech e etc. Um problema muito comum é que algumas impressoras puxam muito papel ao término da impressão dos cupons. O procedimento abaixo corrige em ALGUMAS IMPRESSORAS, não são todas, pois isso depende do FRABRICANTE da mesma, e NÃO do nosso sistema: 01- Entre em iniciar - Dispositivos e Impressoras
02- Clique em ADICIONAR UMA IMPRESSORA 03- Clique em ADICIONAR UMA IMPRESSORA LOCAL
04- Clique em GENERIC E GENERIC / TEXT ONLY E AVANÇAR
05- Digite um nome para a impressora e clique em Avançar.
06- Marque a opção Compartilhar Impressora e clique em Avançar
Impressora instalada agora vamos a configuração do tamanho do papel. 07- Clique com botão direito sobre o desenho da impressora. 08- Clique em Preferências de impressão.
09- Clique em Avançado
10- Clique em Tamanho do Papel e selecione LEDGER, Envelope ou A4. Dependendo do fabricante da impressora e clique em OK
11- Novamente clique com o botão direito sobre o desenho da impressora e na opção Propriedades da Impressora
12- Clique na aba Comandos de Impressora 13- No campo iniciar trabalho de impressão digite: <1B>C<01> Obs: dependendo do fabricante da impressora também pode ser: <1B>C<10> , <1B>C<05>
14- No campo finalizar trabalho de impressão digite: <1B>C<0F> , <1B>M e <1B>W
Confira se seguiu todos os passos acima, clique em OK, entre no software e faça o teste.
Nos últimos anos, a capacidade de armazenamento dos HDs aumentou bastante, mas a velocidade não sofreu avanços significativos. A limitação é do próprio conceito de disco rígido, que utiliza cabeças de leitura e gravação para fazer operações em discos magnéticos que normalmente giram a uma velocidade de 7.200 RPM. Essas partes móveis não existem numa recente solução de armazenamento, o SSD (sigla para solid-state drive ou disco de estado sólido). Muito mais rápido que os velhos discos rígidos, o SSD está ficando cada vez mais atraente. O preço por gigabyte está diminuindo, as capacidades de armazenamento estão aumentando e as velocidades de transferência e os tempos de acesso ficaram ainda mais rápidos com a adoção de novas tecnologias. Como funciona um SSD? Quanto custa no Brasil? A vida útil é muito curta? Vale a pena comprar um SSD? Para descobrir a resposta dessas e outras perguntas, leia os próximos parágrafos.
Como funciona?
Os SSDs mais comuns no mercado possuem dois componentes fundamentais: a memória flash e o controlador.
A memória flash guarda todos os arquivos e, diferente dos discos magnéticos dos HDs, não necessita de partes móveis ou motores para funcionar. Todas as operações são feitas eletricamente, tornando as operações de leitura e escrita mais rápidas, além de deixar o drive mais silencioso e resistente a vibrações e quedas.
O controlador gerencia a troca de dados entre o computador e a memória flash. Formado por um processador que executa diversas tarefas no drive, é um dos principais responsáveis pela performance de um SSD. O chip é capaz de gerenciar o cache de leitura e escrita de arquivos, criptografar informações, mapear partes defeituosas do SSD para evitar corrompimento de dados e garantir uma vida útil maior da memória flash. Um controlador SandForce e oito chips de memória flash dentro do OCZ Vertex 3
O avanço tecnológico nos controladores fez com que a velocidade dos SSDs aumentasse rapidamente. Enquanto os primeiros SSDs de uso doméstico, como o Intel X25-M, atingiam velocidades de 250 MB/s para leitura e 70 MB/s para escrita, os mais recentes chegam a 555 MB/s de leitura e 520 MB/s de escrita, como o Corsair Force GT, com controlador SandForce SF-2281. A quantidade máxima de operações de escrita por segundo cresceu absurdamente, sendo 8,6 mil para o Intel X25-M de 160 GB e 85 mil para o Corsair Force GT de 180 GB.
A SandForce não revela o segredo por trás do seu controlador, mas grande parte de toda essa velocidade é resultado de uma técnica de compressão de dados. Como é necessário manipular menos dados na memória flash, uma operação de gravação de arquivo acaba se tornando mais rápida em muitos casos.
Assim como os HDs, os SSDs também possuem divisões internas. Um disco rígido possui duas divisões fundamentais: setores (menor parte física) e clusters (menor parte reconhecida pelo sistema operacional, formada por vários setores). Um SSD, por sua vez, possui páginas (menor parte física) e blocos (um agrupamento de páginas). Vantagens e desvantagens em relação ao HD
A ausência de partes móveis, principal característica de um SSD, traz diversas vantagens. Como não é necessário mover cabeças para lá e para cá, muito menos deixar um disco girando a uma velocidade altíssima, um SSD é silencioso, possui taxas de transferência maiores, tempos de acesso menores e não sofre com usuários desastrados que derrubam coisas no chão.
As taxas de transferência dos SSDs são realmente impressionantes se comparadas com as dos HDs voltados ao uso doméstico, que geralmente ficam entre 60 MB/s e 100 MB/s. Mas é no tempo de acesso que ele brilha: enquanto um HD comum demora 10 ou 15 milissegundos para acessar um arquivo aleatório, um SSD comum faz a tarefa em 0,1 ou 0,2 milissegundo. Isso, além de resultar em um tempo de boot menor, agiliza todas as operações do sistema. Eu costumo dizer que, hoje, o maior responsável pela lentidão nos PCs é o disco rígido.
A Samsung produziu um vídeo bem legal para comparar o desempenho entre um HD e um SSD. Monitoraram o tempo de inicialização do Windows, a abertura de um arquivo PDF de 25 MB, a capacidade de suportar altas vibrações e o consumo de energia em um notebook. Confira abaixo:
A grande desvantagem dos SSDs ainda está no preço: o custo por gigabyte ainda é bem alto em comparação com os HDs, especialmente no Brasil. Pesquisando rapidamente, é possível encontrar um SSD de 120 GB por R$ 519, resultando em um custo por GB de R$ 4,32. Um HD de 500 GB pode ser encontrado por R$ 249, apenas R$ 0,50 por GB. Memória síncrona e assíncrona
Corsair Force GT, um SSD com memória síncrona
A memória flash de um SSD pode trabalhar de dois modos: síncrona e assíncrona. Essa informação geralmente está disponível na ficha de especificações técnicas do produto, mas os usuários não dão muita importância a isso porque não há muito conteúdo sobre o assunto.
A memória síncrona é mais cara e oferece melhor desempenho para manipular dados que não podem ser comprimidos, como músicas, fotos e vídeos. Já a memória assíncrona é menos cara e não possui uma performance tão boa para gravar dados que não podem ser comprimidos.
Num teste com o CrystalDiskMark feito pelo The SSD Review, o Corsair Force GT (memória síncrona) conseguiu 504,4 MB/s de leitura de dados não comprimidos, enquanto que o Corsair Force 3 (memória assíncrona), obteve apenas 212,6 MB/s. O primeiro certamente é uma opção melhor para pessoas que trabalham com arquivos de áudio e vídeo.
Apesar de o usuário comum não perceber diferença significativa entre um SSD com memória síncrona e outro com memória assíncrona, como a diferença de preço não é tão alta, na maioria dos casos vale juntar um dinheiro a mais e comprar um SSD com memória síncrona, como o OCZ Vertex 3 e o Corsair Force GT.
Preços dos SSDs
Os preços dos SSDs no Brasil ainda não estão uma pechincha e são bastante altos principalmente em comparação com os valores adotados em lojas norte-americanas. Fizemos uma pequena pesquisa de preços para comparar alguns dos principais SSDs do mercado: OCZ Agility 3 (120 GB)
• Velocidade: 525 MB/s (leitura) e 500 MB/s (escrita) • Máximo de operações de escrita de 4 KB por segundo: 85.000 • Preço no Brasil: R$ 519,00 • Preço nos EUA: US$ 93,90
OCZ Vertex 3 (120 GB) • Velocidade: 550 MB/s (leitura) e 500 MB/s (escrita) • Máximo de operações de escrita de 4 KB por segundo: 85.000 • Preço no Brasil: R$ 599,00 • Preço nos EUA: US$ 93,49
OCZ Vertex 4 (128 GB) • Velocidade: 560 MB/s (leitura) e 510 MB/s (escrita) • Máximo de operações de escrita de 4 KB por segundo: 90.000 • Preço no Brasil: R$ 639,90 • Preço nos EUA: US$ 114,99
Corsair Force 3 (120 GB) • Velocidade: 550 MB/s (leitura) e 510 MB/s (escrita) • Máximo de operações de escrita de 4 KB por segundo: 85.000 • Preço no Brasil: R$ 499,90 • Preço nos EUA: US$ 116,99
Corsair Force GT (120 GB) • Velocidade: 555 MB/s (leitura) e 520 MB/s (escrita) • Máximo de operações de escrita de 4 KB por segundo: 85.000 • Preço no Brasil: R$ 535,00 • Preço nos EUA: US$ 125,49
Intel 320 Series (120 GB) • Velocidade: 270 MB/s (leitura) e 130 MB/s (escrita) • Máximo de operações de escrita de 4 KB por segundo: 14.000 • Preço no Brasil: R$ 716,90 • Preço nos EUA: US$ 149,99
Intel 520 Series (120 GB) • Velocidade: 550 MB/s (leitura) e 500 MB/s (escrita) • Máximo de operações de escrita de 4 KB por segundo: 80.000 • Preço no Brasil: R$ 822,90 • Preço nos EUA: US$ 128,50
Kingston SSDNow V+200 (120 GB) • Velocidade: 535 MB/s (leitura) e 480 MB/s (escrita) • Máximo de operações de escrita de 4 KB por segundo: 55.000 • Preço no Brasil: R$ 521,90 • Preço nos EUA: US$ 91,99 Eu, pessoalmente, gosto muito do OCZ Vertex 3 e do Corsair Force GT, drives que oferecem um excelente desempenho sem cobrar preços absurdos como fazem alguns fabricantes. Perguntas frequentes A vida útil de um SSD é muito curta? Por ser baseado em memória flash, assim como pendrives e cartões de memória, os SSDs possuem vida útil limitada pela quantidade de ciclos de escrita. E, curiosamente, com a miniaturização do processo de fabricação das memórias flash, essa quantidade está diminuindo. Convencionou-se que a memória flash dos SSDs suporta 10 mil ciclos de escrita, mas os drives mais novos possuem vida útil estimada em 3 mil ou 5 mil ciclos, segundo o AnandTech. Mas não há motivo para pânico: você não vai detonar seu SSD novinho em folha em um ou dois anos de uso. O controlador do SSD possui uma tecnologia chamada wear leveling, que pode ser traduzida como “distribuição de uso”. Essa tecnologia evita que um mesmo bloco da memória flash seja utilizado muitas vezes. Quando um arquivo é criado ou alterado, o controlador automaticamente grava os novos dados em blocos menos utilizados. Sabendo do wear leveling, vamos simular um cenário hipotético onde você comprou um SSD com capacidade de 120 GB e vida útil de apenas 3 mil ciclos de escrita. Por ser um usuário extremamente avançado, você é capaz de gravar 120 GB de dados todos os dias, o que nem de longe é algo normal. Fazendo as contas, isso significa que você terá pouco mais de 8 anos até que o SSD comece a falhar. Num ritmo mais normal, gravando 20 GB de dados por dia, esse tempo subiria para 49 anos. Em 49 anos, pode ser que nem você esteja funcionando.
Geralmente, os fabricantes são mais conservadores e estimam a vida útil de um SSD como sendo de 5 a 10 anos de uso intenso. A garantia de fabricantes como OCZ e Corsair no exterior é de 3 anos. Como você provavelmente já terá trocado de computador ou feito um upgrade durante esse tempo, não deverá ter problemas. É necessário desfragmentar um SSD?
Você até pode desfragmentar um SSD, mas vai acabar gastando ciclos de escrita desnecessariamente, diminuindo a vida útil do dispositivo. Em outras palavras: não, não é necessário e muito menos recomendável praticar esse tipo de tortura com um SSD.
Como um SSD possui um tempo de acesso extremamente baixo, não há perda significativa de desempenho quando fragmentos de arquivos estão espalhados pelo disco, diferente de um HD, que sofre para mover sua cabeça de leitura para juntar várias partes de um arquivo.
Não desfragmente (nem otimize) um SSD Um SSD fica mais lento com o tempo? Isso era verdade nos SSDs lançados há alguns anos, mas o problema não ocorre nos drives mais novos.
Assim como no HD, excluir um arquivo no Windows não significa que ele será apagado fisicamente do disco. Isso não seria um problema se não fosse uma limitação da memória flash: não é possível apenas regravar dados como em um HD, em que você grava por cima de um arquivo. É necessário restaurar a página do SSD ao estado original e só depois gravar o novo dado, o que acaba diminuindo o desempenho. Também não há meios para restaurar páginas ao estado original de forma independente, é necessário apagar o bloco inteiro. Se o sistema operacional precisar apagar só uma das páginas, o controlador deverá copiar todos os dados de um bloco para um cache, restaurar os dados em outro bloco, apagar o primeiro bloco e então gravar a nova informação. Para evitar todo esse trabalho, o controlador do SSD procura gravar dados preferencialmente em páginas vazias. O problema é que, depois de um tempo, quando todos os blocos já foram usados pelo menos uma vez, o controlador precisaria executar a tarefa sempre. Felizmente, os novos SSDs possuem um comando chamado TRIM, utilizado pelo sistema operacional. Esse comando basicamente “adianta” o trabalho do controlador e limpa os blocos que tiveram arquivos deletados, deixando o SSD como novo. Mas há algumas limitações: o SSD deve suportar o TRIM e o sistema operacional também. Windows 7, Windows 8, Linux 2.6.28+ e OS X 10.6.8+ suportam o comando. Vale a pena? Se você está juntando dinheiro para fazer um upgrade no PC, vale a pena começar a pesquisar preços de SSDs. Com um disco rígido, o desempenho da máquina acaba sendo limitado em tarefas cotidianas, como abertura de programas, carregamento de jogos e qualquer outra operação que envolva leitura e escrita de dados, não importando quão rápido seu processador seja ou quanta RAM você tenha instalado – o resto dos componentes precisará esperar o lento HD fazer seu trabalho para finalmente entrar em ação. Infelizmente, os SSDs são muito mais caros que um HD e devem continuar assim por um longo tempo. Para gastar menos e ter um retorno maior, vale a pena utilizar um SSD apenas para instalar o sistema operacional, os aplicativos e jogos mais usados e seus arquivos de trabalho. Filmes, músicas, fotos e outros arquivos gigantes podem ser armazenados num HD – ou até mesmo na nuvem. O problema de utilizar um SSD e um HD ao mesmo tempo é que, nos notebooks, pode não haver espaço físico suficiente. Nesse caso, a recomendação para quem guarda muitos arquivos é utilizar um HD híbrido, como o Seagate Momentus XT. Esses HDs possuem uma pequena quantidade de memória flash utilizada como cache dos arquivos e programas mais acessados, o que melhora a performance geral do sistema após algum tempo de uso. Por fim, tenha em mente que, após comprar, instalar e usar um SSD, você seguirá um caminho sem volta: após alguns dias, qualquer computador com HD parecerá lento. Fonte: https://tecnoblog.net/108784/ssd-tudo-sobre/ O melhor de tudo é a ferramenta bastante intuitiva para fazer a subistituição do seu HD para o HD SSD, usando uma tecnologia de clonagem do HD.
Segue o software para está tarefa o mesmo pode ser usado rodando os Sistemas Operacionais: Windows XP até o Windows 10 em modo free.
Neste endereço: http://br.easeus.com/backup-recovery/copy-and-clone-hard-drive.html Você encontrara o software e um pequeno tutorial para fazer a clonagem dos HD´s. Na etapa de Destino, desmarque -Clone setor por setor e marque -Otimizar para SSD.
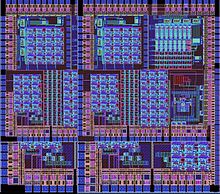
Microprocessador O microprocessador, popularmente chamado de processador, é um circuito integrado que realiza as funções de cálculo e tomada de decisão de um computador. Todos os computadores e equipamentos eletrônicos baseiam-se nele para executar suas funções, podemos dizer que o processador é o cérebro do computador por realizar todas estas funções, é tornar o computador inteligente.
Um microprocessador incorpora as funções de uma unidade central de computador (CPU) em um único circuito integrado, ou no máximo alguns circuitos integrados. É um dispositivo multifuncional programável que aceita dados digitais como entrada, processa de acordo com as instruções armazenadas em sua memória, e fornece resultados como saída. Microprocessadores operam com números e símbolos representados no sistema binário.
O microprocessador moderno é um circuito integrado formado por uma camada chamada de mesa epitaxial de silício, trabalhada de modo a formar umcristal de extrema pureza, laminada até uma espessura mínima com grande precisão, depois cuidadosamente mascarada por um processo fotográfico e dopada pela exposição a altas temperaturas em fornos que contêm misturas gasosas de impurezas. Este processo é repetido tantas vezes quanto necessário à formação da microarquitetura do componente.
Responsável pel a execução das instruções num sistema, o microprocessador, escolhido entre os disponíveis no mercado, determina, em certa medida a capacidade de processamento do computador e também o conjunto primário de instruções que ele compreende. O sistema operativo é construído sobre este conjunto.
O próprio microprocessador subdivide-se em várias unidades, trabalhando em altas freqüências. A ULA(Unidade Lógica Aritmética), unidade responsável pelos cálculos aritméticos e lógicos e os registradores são parte integrante do microprocessador na família x86, por exemplo.
Embora seja a essência do computador, o microprocessador diferente do microcontrolador, está longe de ser um computador completo. Para que possa interagir com o utilizador precisa de: memória, dispositivos de entrada/saída, um clock, controladores e conversores de sinais, entre outros. Cada um desses circuitos de apoio interage
de modo peculiar com os programas e, dessa forma, ajuda a moldar o funcionamento do computador.
História O primeiro microprocessador comercial foi inventado pela Intel em 1971 para atender uma empresa japonesa que precisava de um circuito integrado especial para as suas atividades. A Intel projectou o 4004, que era um circuito integrado programável que trabalhava com registradores de 4 bits, 46 instruções, clock de 740Khz e possuía cerca de 2300 transistores. Percebendo a utilidade desse invento a Intel prosseguiu com o desenvolvimento de novos microprocessadores: 8008 (o primeiro de 8 bits) e a seguir o 8080 e o microprocessador 8085. O 8080 foi um grande sucesso e tornou-se a base para os primeiros microcomputadores pessoais na década de 1970 graças ao sistema operacional CP/M. Da Intel saíram alguns funcionários que fundaram a Zilog, que viria a lançar o microprocessador Z80, com instruções compatíveis com o 8080 (embora muito mais poderoso que este) e também de grande sucesso. A Motorola possuía o 68000 e a MOS Technology o 6502. A Motorola ganhou destaque quando implantou oMC68000P12, de 12 MHz com arquitetura de 32 bits (embora seu Barramento fosse de 24 bits e seu Barramento de endereços de 16 bits), no Neo-Geo, um poderoso Arcade da SNK que posteriormente ganharia a versão AES (console casero) e CD (versão CD), todos eles com o mesmo hardware inicial. Todos os microprocessadores de 8 bits foram usados em muitos computadores pessoais (Sinclair, Apple Inc., TRS, Commodore, etc).
Em 1981 a IBM decidiu lançar-se no mercado de computadores pessoais e no seu IBM-PC utilizou um dos primeiros microprocessadores de 16 bits, o 8088 (derivado do seu irmão 8086 lançado em 1978) que viria a ser o avô dos computadores atuais. A Apple nos seus computadores Macintosh utilizava os processadores da Motorola, a família 68000 (de 32 bits). Outros fabricantes também tinham os seus microprocessadores de 16 bits, a Zilog tinha o Z8000, a Texas Instruments o TMS9900, a National Semiconductor tinha o 16032,mas nenhum fabricante teve tanto sucesso como a Intel, que sucessivamente foi lançando melhoramentos na sua linha 80X86, tendo surgido assim (por ordem cronológica) o 8086, 8088, 80186, 80188, 80286, 80386, 80486,Pentium, Pentium Pro, Pentium MMX, Pentium II, Pentium III, Pentium IV, Pentium M, Pentium D, Pentium Dual Core, Core 2 Duo, Core 2 Quad, Core i3, Core i5 e Core i7. Para o IBM-AT foi utilizado o 80286, depois um grande salto com o 80386 que podia trabalhar com memória virtual e multitarefa, o 80486 com coprocessador matemático embutido e finalmente a linha Pentium, com pipeline de processamento.
Como grande concorrente da Intel, a AMD aparece inicialmente como fabricante de microprocessadores da linha x86 alternativa mas a partir de um certo momento deixou de correr atrás da Intel e partiu para o desenvolvimento de sua própria linha de microprocessadores: K6, Athlon, Duron, Turion, Sempron, Phenom. Paralelamente à disputa entre Intel e AMD, a IBM possuía a linhaPowerPC utilizada principalmente pelos microcomputadores da Apple.
A evolução tecnológica envolvida é surpreendentemente grande, de microprocessadores que trabalhavam com clock de dezenas de kHz e que podiam processar alguns milhares de instruções por segundo, atingiu-se clocks na casa dos 7 GHz e poder de processamento de dezenas de bilhões de instruções por segundo. A complexidade também cresceu: de alguns milhares de transístores para centenas de milhões de transístores numa mesma pastilha.
O CPU tem como função principal unificar todo o sistema, controlar as funções realizadas por cada unidade funcional, e é também responsável pela execução de todos os programas do sistema, que deverão estar armazenados na memória principal.
Componentes
O processador é composto por alguns componentes, cada um tendo uma função específica no processamento dos programas.
Unidade lógica e aritmética -
A Unidade lógica e aritmética (ULA) é a responsável por executar efetivamente as instruções dos programas, como instruções lógicas, matemáticas, desvio, etc.
Unidade de controle -
A Unidade de controle (UC) é responsável pela tarefa de controle das ações a serem realizadas pelo computador, comandando todos os outros componentes.
Registradores -
Os registradores são pequenas memórias velozes que armazenam comandos ou valores que são utilizados no controle e processamento de cada instrução. Os registradores mais importantes são:
• Contador de Programa (PC) – Sinaliza para a próxima instrução a ser executada;
• Registrador de Instrução (IR) – Registra a execução da instrução;
Unidade de Gerenciamento de Memória -
A MMU (em inglês: Memory Management Unit) é um dispositivo de hardware que transforma endereços virtuais em endereços físicos e administra a memória principal do computador.
Unidade de ponto flutuante -
Nos processadores atuais são implementadas unidades de cálculo de números reais. Tais unidades são mais complexas que ULAs e trabalham com operandos maiores, com tamanhos típicos variando entre 64 e 128 bits.
Frequência de operação
O relógio do sistema (Clock) é um circuito oscilador a cristal (efeito piezoelétrico) que tem a função de sincronizar e ditar a medida de tempo de transferência de dados no computador. Esta freqüência é medida em ciclos por segundo, ou Hertz. A capacidade de processamento do processador não está relacionada exclusivamente à frequência do relógio, mas também a outros fatores como: largura dos barramentos, quantidade de memória cache, arquitetura do processador, tecnologia de co-processamento, tecnologia de previsão de saltos (branch prediction), tecnologia de pipeline, conjunto de instruções, etc.
O aumento da frequência de operação nominal do processador é denominado overclocking.
Arquitetura
Existem duas principais arquiteturas usadas em processadores:
• A arquitetura de Von Neumann. Esta arquitetura caracteriza-se por apresentar um barramento externo compartilhado entre dados e endereços. Embora apresente baixo custo, esta arquitetura apresenta desempenho limitado pelo gargalo do barramento.
• A arquitetura de Harvard. Nesta arquitetura existem dois barramentos externos independentes (e normalmente também memórias independentes) para dados e endereços. Isto reduz de forma sensível o gargalo de barramento, que é uma das principais barreiras de desempenho, em detrimento do encarecimento do sistema como um todo.
Modelos de computação
Existem dois modelos de computação usados em processadores:
• CISC (em inglês: Complex Instruction Set Computing, Computador com um Conjunto Complexo de Instruções), usada em processadores Intel e AMD; possui um grande conjunto de instruções (tipicamente centenas) que são armazenadas em uma pequena memória não-volátil interna ao processador. Cada posição desta memória contém as microinstruções, ou seja, os passos a serem realizados para a execução de cada instrução. Quanto mais complexa a instrução, mais microinstruções ela possuirá e mais tempo levará para ser executada. Ao conjunto de todas as microinstruções contidas no processador denominamos microcódigo. Esta técnica de computação baseada em microcódigo é denominada microprogramação.
• RISC (em inglês: Reduced Instruction Set Computing, Computador com um Conjunto Reduzido de Instruções) usada em processadores PowerPC (da Apple, Motorola e IBM) e SPARC (SUN); possui um conjunto pequeno de instruções (tipicamente algumas dezenas) implementadas diretamente em hardware. Nesta técnica não é necessário realizar a leitura em uma memória e, por isso, a execução das instruções é muito rápida (normalmente um ciclo de clock por instrução). Por outro lado, as instruções são muito simples e para a realização de certas tarefas são necessárias mais instruções que no modelo RISC.
Exemplos de microprocessadores
Microprocessadores — São utilizados nos computadores pessoais, onde são chamadas de Unidade Central de Processamento (CPU), workstations e mainframes. Podem ser programados para executar as mais variadas tarefas. • Processadores Digitais de Sinal (DSP do inglês Digital Signal Processor) — são microprocessadores especializados em processamento digital de sinal usados para processar sinais de áudio, vídeo, etc., quer em tempo real quer em off-line. Estão presentes, por exemplo, em aparelhos de CD, DVD e televisores digitais. Em geral, realizam sempre uma mesma tarefas simples. • Microcontroladores — Processadores relativamente flexíveis, de relativo baixo custo, que podem ser utilizados em projetos de pequeno tamanho. Podem trazer facilidades como conversores A/D embutidos, ou um conjunto de instruções próprias para comunicação digital através de algum protocolo específico.
• GPU — (ou Unidade de Processamento Gráfico), é um microprocessador especializado em processar gráficos. São utilizadas em placas de vídeo para fazer computação gráfica.
Propósito geral e dedicado
Durante o processo de desenvolvimento do design de um processador, uma das características que se leva em conta é o uso que ele se destina. Processadores gráficos e controladoras por exemplo não tem o mesmo fim que um processador central. Processadores de propósito geral podem executar qualquer tipo de software, embora sua execução seja mais lenta que o mesmo sendo executado em um processador especializado. Processadores dedicados são fabricados para executarem tarefas específicas, como criptografia, processamento vetorial e gráfico, sendo nesse caso bem mais rápidos do que processadores de propósito geral em tarefas equivalentes. No caso do processamento gráfico, existem as GPUs, que são microprocessadores geralmente com memória dedicada e especialmente desenvolvidos para cálculos gráficos. Nem sempre os processadores seguem definidamente esses dois modelos, sendo o motivo disso que muitos processadores modernos incorporam processadores especializados (co-processador), para cálculos de criptografia, processamento de vetores, etc. Processadores multinucleares
Até poucos anos atrás usou-se microprocessadores para atividades domésticas ou de negócios com simples núcleo. Atualmente estão sendo utilizados microprocessadores de múltiplos núcleos para melhorar a capacidade de processamento. Espera-se que no futuro os Sistemas Operacionais domésticos sejam compilados para trabalhar com processadores de múltiplos núcleos corretamente, realizando assim inúmeras tarefas ao mesmo tempo (como já acontece com os supercomputadores). Sistemas multiprocessados Em muitos sistemas o uso de um só processador é insuficiente. A solução nesses casos é usar dois ou mais processadores em multi processamento, aumentando assim a quantidade de processadores disponíveis ao sistema operacional. Sistemas multiprocessados podem ser de basicamente dois tipos:
· Multiprocessamento simétrico (SMP): os processadores compartilham a mesma memória, embora possam ter caches separadas. O sistema operacional deve estar preparado para trabalhar com coerência de caches e, principalmente, evitar condições de corrida na memória principal.
· Acesso não uniforme à memória (NUMA): a cada processador é associado um banco de memória. Nesse caso, o sistema operacional trata cada banco separadamente, pois cada banco tem um custo de acesso diferente, dependendo de qual o processador a que está associado e onde está sendo executado o processo que tenta acessar a memória. Capacidade de processamento A capacidade de processamento de um microprocessador é de certa forma difícil de medir, uma vez que esse desempenho pode se referir a quantidade máxima teória de instruções que podem ser executadas por segundo, que tipos de instruções são essas, em Flops (instruções de ponto flutuante), podendo essa ser de precisão simples, dupla, quádrupla, dependendo do contexto, e em MIPS (milhões de instruções por segundo), sendo essas operações com números inteiros. Somente a capacidade máxima teórica de um microprocessador não define seu desempenho, somente dá uma noção da sua capacidade, uma vez que sua arquitetura, barramento com a memória entre outros também influenciam no seu desempenho final, sendo assim, sua capacidade de processamento é medida comparando a velocidade de execução de aplicativos reais, podendo assim, testar seu desempenho em atividades comuns.
RAM Memória de acesso aleatório (do inglês Random Access Memory, frequentemente abreviado para RAM) é um tipo de memória que permite a leitura e a escrita, utilizada como memória primária em sistemas eletrônicos digitais.
A memória RAM é um componente essencial não apenas nos computadores pessoais, mas em qualquer tipo de computador, pois é onde basicamente ficam armazenados os programas básicos operacionais. Por mais que exista espaço de armazenamento disponível, na forma de um HDD ou memória flash, é sempre necessária uma certa quantidade de memória RAM e, naturalmente, quanto mais memória, melhor o desempenho, uma vez que os programas tendem a se desenvolver com o passar do tempo e da pesquisa científica.
O termo acesso aleatório identifica a capacidade de acesso a qualquer posição e em qualquer momento, por oposição ao acesso sequencial, imposto por alguns dispositivos de armazenamento, como fitas magnéticas. O nome não é verdadeiramente apropriado, já que outros tipos de memória (como a ROM) também permitem o acesso aleatório a seu conteúdo. O nome mais apropriado seria: Memória de Leitura e Escrita, que está expressa na programação computacional. Apesar do conceito de memória operacional de acesso aleatório ser bastante amplo, atualmente o termo é usado apenas para definir um dispositivo eletrônico que o implementa, uma vez que atualmente essa memória se encontra espalhada dentro do próprio sistema dos atuais computadores (sistema por assim dizer *nervoso" do computador, como o humano), basicamente um tipo específico de chip. Nesse caso, também fica implícito que é uma memória volátil, isto é, todo o seu conteúdo é perdido quando a alimentação da memória é desligada. A memória principal de um computador baseado na Arquitetura de Von-Neumann é constituída por RAM. É nesta memória que são carregados os programas em execução e os respectivos dados do utilizador. Uma vez que se trata de memória volátil, os seus dados são perdidos quando o computador é desligado. Para evitar perdas de dados, é necessário salvar a informação para suporte não volátil, como o disco rígido.
Introdução É usada pelo processador para armazenar os arquivos e programas que estão sendo processados. A quantidade de memória RAM disponível tem um grande efeito sobre o desempenho, já que sem uma quantidade suficiente dela o sistema passa a usar memória virtual, que é lenta. A principal característica da RAM é que ela é volátil, ou seja, os dados se perdem ao reiniciar o computador. Ao ligar é necessário refazer todo o processo de carregamento, em que o sistema operacional e aplicativos usados são transferidos do HD para a memória, onde podem ser executados pelo processador.
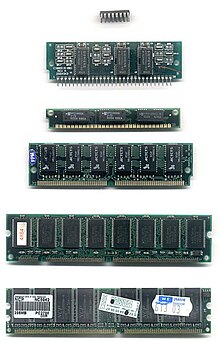
Os chips de memória são vendidos na forma de pentes de memória. Existem pentes de várias capacidades, e normalmente as placas possuem dois ou três encaixes disponíveis. Há como instalar um pente de 1 GB junto com o de 512 MB que veio no micro para ter um total de 1536 MB, por exemplo.
História
O primeiro tipo de memória RAM foi a núcleo magnético, desenvolvida de 1955 a 1975 e, posteriormente, utilizada na maioria dos computadores até o desenvolvimento e adoção da estática e dinâmica de circuitos integrados RAM no final dos anos 1960 e início de 1970. Tipos
Existem basicamente dois tipos de memória em uso: SDR e DDR. As SDRs são o tipo tradicional, onde o controlador de memória realiza apenas uma leitura por ciclo, enquanto as DDR são mais rápidas, pois fazem duas leituras por ciclo. O desempenho não chega a dobrar, pois o acesso inicial continua demorando o mesmo tempo, mas melhora bastante. Os pentes de memória SDR são usados em micros antigos: Pentium II e Pentium III e os primeiros Athlons e Duronssoquete A. Por não serem mais fabricados, eles são atualmente muito mais raros e caros que os DDR, algo semelhante ao que aconteceu com os antigos pentes de 72 vias, usados na época do Pentium 1.
É fácil diferenciar os pentes SDR e DDR, pois os SDR possuem dois chanfros e os DDR apenas um. Essa diferença faz com que também não seja possível trocar as bolas, encaixando por engano um pente DDR numa placa-mãe que use SDR e vice-versa. Mais recentemente, tem acontecido a uma nova migração, com a introdução dos pentes de memória DDR2. Neles, o barramento de acesso à memória trabalha ao dobro da frequência dos chips de memória propriamente ditos. Isso permite que sejam realizadas duas operações de leitura por ciclo, acessando dois endereços diferentes. Como a capacidade de realizar duas transferências por ciclo introduzida nas memórias DDR foi preservada, as memórias DDR2 são capazes de realizar um total de 4 operações de leitura por ciclo, uma marca impressionante. Existem ainda alguns ganhos secundários, como o menor consumo elétrico, útil em notebooks.
Os pentes de memória DDR2 são incompatíveis com as placas-mãe antigas. Eles possuem um número maior de contatos (um total de 240, contra 184 dos pentes DDR), e o chanfro central é posicionado de forma diferente, de forma que não seja possível instalá-los nas placas antigas por engano. Muitos pentes são vendidos com um dissipador metálico, que ajuda na dissipação do calor e permite que os módulos operem a frequências mais altas.
Capacidade e Velocidade A capacidade de uma memória é medida em Bytes, kilobytes (1 KB = 1024 ou 210 Bytes), megabytes (1 MB = 1024 KB ou 220 Bytes), gigabytes (1 GB = 1024 MB ou 230 Bytes) e terabytes (1 TB = 1024 GB ou 240 Bytes).
A velocidade de funcionamento de uma memória é medida em Hz ou MHz. Este valor está relacionado com a quantidade de blocos de dados que podem ser transferidos durante um segundo. Existem no entanto algumas memórias RAM que podem efetuar duas transferências de dados no mesmo ciclo de clock, duplicando a taxxa de transferência de informação para a mesma frequência de trabalho. Além disso, a colocação das memórias em paralelo (propriedade da arquitetura de certos sistemas) permite multiplicar a velocidade aparente da memória.
Cache
De qualquer forma, apesar de toda a evolução a memória RAM continua sendo muito mais lenta que o processador. Para atenuar a diferença, são usados dois níveis de cache, incluídos no próprio processador: o cache L1 e o cache L2. O cache L1 é extremamente rápido, trabalhando próximo à freqüência nativa do processador. Na verdade, os dois trabalham na mesma frequência, mas são necessários alguns ciclos de clock para que a informação armazenada no L1 chegue até as unidades de processamento. No caso do Pentium 4, chega-se ao extremo de armazenar instruções já decodificadas no L1: elas ocupam mais espaço, mas eliminam este tempo inicial. De uma forma geral, quanto mais rápido o cache, mais espaço ele ocupa e menos é possível incluir no processador. É por isso que o Pentium 4 inclui apenas um total de 20 KB desse cache L1 ultra-rápido, contra os 128 KB do cache um pouco mais lento usado no Sempron. Em seguida vem o cache L2, que é um pouco mais lento tanto em termos de tempo de acesso (o tempo necessário para iniciar a transferência) quanto em largura de banda, mas é bem mais econômico em termos de transistores, permitindo que seja usado em maior quantidade. O volume de cache L2 usado varia muito de acordo com o processador. Enquanto a maior parte dos modelos do Sempron utilizam apenas 256 KB, os modelos mais caros do Core 2 Duo possuem 4 MB completos. Paridade de memória É um método criado para correção de erros de memória, é antigo, e somente identifica erros, não os corrige. Consiste na adição de um bit de controle no final de cada byte de memória.
Paridade de memória
É um método criado para correção de erros de memória. É o método mais antigo, e somente identifica erros, não os corrige, e consiste na adição de um bit de controle no final de cada byte de memória. A operação de checagem dos dados na paridade é bem simples: são contados o número de bits “1” de cada byte. Se o número for par, o bit de paridade assume um valor “0” e caso seja ímpar, 9º bit assume um valor “1”. Quando requisitados pelo processador, os dados são checados pelo circuito de paridade que verifica se o número de bits “1” corresponde ao depositado no 9º bit. Caso seja constatada alteração nos dados, ele envia ao processador uma mensagem de erro. O método não é totalmente eficaz, pois não é capaz de detectar a alteração de um número de bits que mantenha a paridade. Se dois bits zero retornassem alterados para bits um, o circuito de paridade não notaria a alteração nos dados. Felizmente, a possibilidade de alteração de dois ou mais bits ao mesmo tempo é remota. O uso da paridade não torna o computador mais lento, pois os circuitos responsáveis pela checagem dos dados são independentes do restante do sistema. Seu único efeito colateral, é o encarecimento das memórias, que ao invés de 8 bits por byte, passam a ter 9, tornando-se cerca de 12 a 60% mais caras. Dispositivo ECC-(Error Correct Code) - Código de correção de erros. Código de detecção no qual uma combinação de pulsos proibitiva pelo acréscimo ou perda de 1 bit indica qual bit esta errado. Além do custo, a paridade não permite corrigir os erros, apenas identificá-los, o que diminui sua utilidade prática. O aumento do bom nível de confiabilidade dos novos módulos de memórias fez com que as memórias com paridade caíssem em desuso.
Disco Rígido ou Disco Duro, popularmente chamado também de HD (derivação de HDD do inglês hard disk drive) ou winchester (termo em desuso), "memória de massa" ou ainda de "memória secundária" é a parte do computador onde são armazenados os dados. O disco rígido é uma memória não-volátil, ou seja, as informações não são perdidas quando o computador é desligado, sendo considerado o principal meio de armazenamento de dados em massa. Por ser uma memória não-volátil, é um sistema necessário para se ter um meio de executar novamente programas e carregar arquivos contendo os dados inseridos anteriormente quando ligamos o computador. Nos sistemas operativos mais recentes, ele é também utilizado para expandir a memória RAM, através da gestão de memória virtual. Existem vários tipos de interfaces para discos rígidos diferentes: IDE/ATA, Serial ATA, SCSI, Fibre channel, SAS.
História do disco rígido
O primeiro disco rígido foi construído pela IBM em 1956, e foi lançado em 16 de Setembro de 1957. Era formado por 50 discos magnéticos contendo 50 000 setores, sendo que cada um suportava 100 caracteres alfanuméricos, totalizando uma capacidade de 5 megabytes, incrível para a época. Este primeiro disco rígido foi chamado de 305 RAMAC (Random Access Method of Accounting and Control) e tinha dimensões de 152,4 centímetros de comprimento, 172,72 centimetros de largura e 73,66 centímetros de altura.
Em 1973 a IBM lançou o modelo 3340 Winchester, com dois pratos de 30 megabytes e tempo de acesso de 30 milissegundos. Assim criou-se o termo 30/30 Winchester (uma referência à espingarda Winchester 30/30), termo muito usado antigamente para designar HDs de qualquer espécie. Ainda no início da década de 1980, os discos rígidos eram muito caros e modelos de 10 megabytes custavam quase 2 mil dólares americanos, enquanto em 2009 compramos modelos de 1.5 terabyte por pouco mais de 100 dólares. Ainda no começo dos anos 80, a mesma IBM fez uso de uma versão pack de discos de 80 megabytes, usado nos sistemas IBM Virtual Machine. Os discos rigidos foram criados originalmente para serem usados em computadores em geral. Mas no século XXI as aplicações para esse tipo de disco foram expandidas e agora são usados em câmeras filmadoras, ou camcorders nos Estados Unidos; tocadores de música como iPod, MP3 player; PDAs; videogames, e até em celulares. Para exemplos em videogames temos o Xbox360 e o Playstation 3, lançados em 2005 e 2006 respectivamente, com esse diferencial, embora a Microsoft já tivesse lançado seu primeiro Xbox (em 2001) com disco rígido convencional embutido. Já para celular os primeiros a terem essa tecnologia foram os da Nokia e da Samsung. E também devemos lembrar que atualmente o disco rigido não é só interno, existem também os externos, que possibilitam o transporte de grandes quantidades de dados entre computadores sem a necessidade de rede. Como os dados são gravados e lidos Os discos magnéticos de um disco rígido são recobertos por uma camada magnética extremamente fina. Na verdade, quanto mais fina for a camada de gravação, maior será sua sensibilidade, e conseqüentemente maior será a densidade de gravação permitida por ela. Poderemos, então, armazenar mais dados num disco do mesmo tamanho, criando HDs de maior capacidade. Os primeiros discos rígidos, assim como os discos usados no início da década de 80, utilizavam a mesma tecnologia de mídia magnética utilizada em disquetes, chamada coated media, que além de permitir uma baixa densidade de gravação, não é muito durável. Os discos atuais já utilizam mídia laminada (plated media), uma mídia mais densa, de qualidade muito superior, que permite a enorme capacidade de armazenamento dos discos modernos. A cabeça de leitura e gravação de um disco rígido funciona como um eletroímã semelhante aos que estudamos nas aulas de ciências e física do colegial, sendo composta de uma bobina de fios que envolve um núcleo de ferro. A diferença é que, num disco rígido, este eletroímã é extremamente pequeno e preciso, a ponto de ser capaz de gravar trilhas medindo menos de um centésimo de milímetro de largura. Quando estão sendo gravados dados no disco, a cabeça utiliza seu campo magnético para organizar as moléculas de óxido de ferro da superfície de gravação, fazendo com que os pólos positivos das moléculas fiquem alinhados com o pólo negativo da cabeça e, conseqüentemente, com que os pólos negativos das moléculas fiquem alinhados com o pólo positivo da cabeça. Usamos, neste caso, a velha lei "os opostos se atraem". Como a cabeça de leitura e gravação do HD é um eletroímã, sua polaridade pode ser alternada constantemente. Com o disco girando continuamente, variando a polaridade da cabeça de gravação, variamos também a direção dos pólos positivos e negativos das moléculas da superfície magnética. De acordo com a direção dos pólos, temos um bit 1 ou 0 (sistema binário). Para gravar as sequências de bits 1 e 0 que formam os dados, a polaridade da cabeça magnética é mudada alguns milhões de vezes por segundo, sempre seguindo ciclos bem determinados. Cada bit é formado no disco por uma seqüência de várias moléculas. Quanto maior for a densidade do disco, menos moléculas serão usadas para armazenar cada bit, e teremos um sinal magnético mais fraco. Precisamos, então, de uma cabeça magnética mais precisa. Quando é preciso ler os dados gravados, a cabeça de leitura capta o campo magnético gerado pelas moléculas alinhadas. A variação entre os sinais magnéticos positivos e negativos gera uma pequena corrente elétrica que caminha através dos fios da bobina. Quando o sinal chega à placa lógica do HD, ele é interpretado como uma seqüência de bits 1 e 0. Desse jeito, o processo de armazenamento de dados em discos magnéticos parece ser simples, e realmente era nos primeiros discos rígidos (como o 305 RAMAC da IBM), que eram construídos de maneira praticamente artesanal. Apesar de nos discos modernos terem sido incorporados vários aperfeiçoamentos, o processo básico continua sendo o mesmo. Formatação do disco A formatação de um disco magnético é realizada para que o sistema operacional seja capaz de gravar e ler dados no disco, criando assim estruturas que permitam gravar os dados de maneira organizada e recuperá-los mais tarde. Existem dois tipos de formatação, chamados de formatação física e formatação lógica. A formatação física é feita na fábrica ao final do processo de fabricação, que consiste em dividir o disco virgem em trilhas, setores, cilindros e isola os bad blocks (danos no HD). Estas marcações funcionam como as faixas de uma estrada, permitindo à cabeça de leitura saber em que parte do disco está, e onde ela deve gravar dados. A formatação física é feita apenas uma vez, e não pode ser desfeita ou refeita através de software. Porém, para que este disco possa ser reconhecido e utilizado pelo sistema operacional, é necessária uma nova formatação, chamada de formatação lógica. Ao contrário da formatação física, a formatação lógica não altera a estrutura física do disco rígido, e pode ser desfeita e refeita quantas vezes for preciso, através do comando Format do DOS, por exemplo. O processo de formatação é quase automático; basta executar o programa formatador que é fornecido junto com o sistema operacional. Exemplos de sistema de arquivos Os sistemas de arquivos mais conhecidos são os utilizados pelo Microsoft Windows: NTFS, FAT32 e FAT 16. O FAT32 é uma versão evoluída do FAT16 introduzida a partir do MS-DOS 4.0. A partir do Windows NT foi introduzido o NTFS, que trouxe novos recursos. Setor de boot
Quando o computador é ligado, o POST (Power-on Self Test), um pequeno programa gravado em um chip de memória ROM na placa-mãe, que tem a função de “dar a partida”, tentará inicializar o sistema operacional. Independentemente de qual sistema de arquivos se esteja usando, o primeiro setor do disco rígido será reservado para armazenar informações sobre a localização do sistema operacional, que permitem ao BIOS "achá-lo" e iniciar seu carregamento. No setor de boot é registrado onde o sistema operacional está instalado, com qual sistema de arquivos o disco foi formatado e quais arquivos devem ser lidos para inicializar o computador. Um setor é a menor divisão física do disco, e possui na grande maioria das vezes 512 Bytes (nos CD-ROMs e derivados é de 2048 Bytes). Um cluster, também chamado de agrupamento, é a menor parte reconhecida pelo sistema operacional, e pode ser formado por vários setores. Um arquivo com um número de bytes maior que o tamanho do cluster, ao ser gravado no disco, é distribuído em vários clusters. Porém, um cluster não pode pertencer a mais de um arquivo. Um único setor de 512 Bytes pode parecer pouco, mas é suficiente para armazenar o registro de boot devido ao seu pequeno tamanho. O setor de boot também é conhecido como "trilha MBR", "trilha 0' etc. Como dito, no disco rígido existe um setor chamado Trilha 0, e nele está gravado o (MBR) (Master Boot Record), que significa "Registro de Inicialização Mestre", um estilo de formatação, onde são encontradas informações sobre como está dividido o disco (no sentido lógico)e sobre a ID de cada tabela de partição do disco, que dará o boot. O MBR é lido pelo BIOS, que interpreta a informação e em seguida ocorre o chamado "bootstrap", "levantar-se pelo cadarço", lê as informações de como funciona o sistema de arquivos e efetua o carregamento do sistema operacional. O MBR e a ID da tabela de partição ocupam apenas um setor de uma trilha, o restante dos setores desta trilha não são ocupados, permanecendo vazios, servindo como área de proteção do MBR. É nesta mesma área que alguns vírus (Vírus de Boot) se alojam.
Com a constante demanda por espaço, mais as melhorias da tecnologia de fabricação, tem havido uma mudança para setores de tamanho maior, tipicamente para 4096 Bytes. Tal mudança é para que seja melhor utilizado o espaço do disco para mais infomações úteis. Cada setor precisa(para que os dados sejam confiáveis) de um conjunto de bits adicionais para verificação contra erros(para que a própria controladora consiga detectar erros de leitura física), com o aumento de capacidade dos discos, diminui-se o número de átomos para representar um determinado bit, que o torna mais frágil, aumentando o risco de perca de dados. Para não haver problemas por causa dessa fragilidade, aumenta-se o número de bits para a verificação da integridade da informação no setor, o que acaba diminuindo o espaço utilizável para os dados do usuário. Com o aumento para 4096 Bytes, cai, consideravelmente, o número de bits usado para verificação de integridade em todo o disco, pois haverá menos setores no disco, e como o mesmo número de bits, por setor, consegue ser utilizado para uma verificação de uma porção maior de dados, decai o 'desperdício' por causa da verificação da integridade. Disquetes, Zip-disks e CD-ROMs não possuem MBR; no entanto, possuem tabela de partição, no caso do CD-ROMs e seu descendentes (DVD-ROM, HDDVD-ROM, BD-ROM...) possuem tabela própria, podendo ser CDFS (Compact Disc File System, norma ISO 9660) ou UDF (Universal Disc Format, uma implementação do padrão ISO/IEC 13346) ou, para maior compatibilidade, os dois; já os cartões de memória Flash e Pen-Drives possuem tabela de partição e podem ter até mesmo MBR, dependendo de como formatados. O MBR situa-se no primeiro setor da primeira trilha do primeiro prato do HD (setor um, trilha zero, face zero, prato zero). O MBR é constituído pelo bootstrap e pela tabela de partição. O bootstrap é o responsável por analisar a tabela de partição em busca da partição ativa. Em seguida, ele carrega na memória o Setor de Boot da partição. Esta é a função do bootstrap. A tabela de partição contém informações sobre as partições existentes no disco. São informações como o tamanho da partição, em qual trilha/setor/cilindro ela começa e termina, qual o sistema de arquivos da partição, se é a partição ativa; ao todo, são dez campos. Quatro campos para cada partição possível (por isso, só se pode ter 4 partições primárias, e é por isso também que foi-se criada a partição estendida...), e dez campos para identificar cada partição existente. Quando acaba o POST, a instrução INT 19 do BIOS lê o MBR e o carrega na memória, e é executado o bootstrap. O bootstrap vasculha a tabela de partição em busca da partição ativa, e em seguida carrega na memória o Setor de Bootdela. A função do Setor de Boot é a de carregar na memória os arquivos de inicialização do sistema operacional. O Setor de Boot fica situado no primeiro setor da partição ativa. Capacidade do disco rígido A capacidade de um disco rígido atualmente disponível no mercado para uso doméstico/comercial varia de 10 a 3000 GB, assim como aqueles disponíveis para empresas, de mais de 3 TB. O HD evoluiu muito. O mais antigos possuíam 5 MB (aproximadamente 4 disquetes de 3 1/2 HD), sendo aumentada para 30 MB, em seguida para 500 MB (20 anos atrás), e 10 anos mais tarde, HDs de 1 a 3 GB. Em seguida lançou-se um HD de 10 GB e posteriormente um de 15 GB. Posteriormente, foi lançado no mercado um de 20 GB, até os atuais HDs dos mais variados tamanhos. No entanto, as indústrias consideram 1 GB = bytes, pois no Sistema Internacional de Unidades(SI), que trabalha com potências de dez, o prefixo giga quer dizer ou (bilhões), enquanto os sistemas operacionais consideram 1 GB = bytes, já que os computadores trabalham com potências de dois e 1024 é a potência de dois mais próxima de mil. Isto causa uma certa disparidade entre o tamanho informado na compra do HD e o tamanho considerado pelo Sistema Operacional, conforme mostrado na tabela abaixo. Além disso, outro fator que pode deixar a capacidade do disco menor do que o anunciado é a formatação de baixo nível (formatação física) com que o disco sai de fábrica.
Toda a vez que um HD é formatado, uma pequena quantidade de espaço é marcada como utilizada, podendo ser(dependendo do suporte do sistema de arquivos) pelo log do Journaling, mapa de clusters livres, etc. Disco rígido externo Disco rígido externo, conhecido popularmente como HD externo, é um dispositivo de armazenamento independente, que pode ser conectado a um computador através de USB, e-Sata, FireWire ou outros meios.
Capacidade de armazenamento de discos externos: 320GB, 500GB, 750GB, 1TB, 2TB.